

Very often there is a need to use several servo motors on board one FPV drone. For example, for bomber drones. It is necessary to connect a jettison and a rotary camera, and sometimes a camera switching board (flight and jettison, if the jettison camera is thermal). The Speedybee F405 flight controller has only one contact pad for soldering the PWM signal - S9. This is not a big problem because this flight controller has contacts for connecting four more motors M5-M8 (octocopter configuration). In the command line mode of the Betaflight program, we can configure the M5 contact to control the servo. To do this:
- Go to the CLI tab
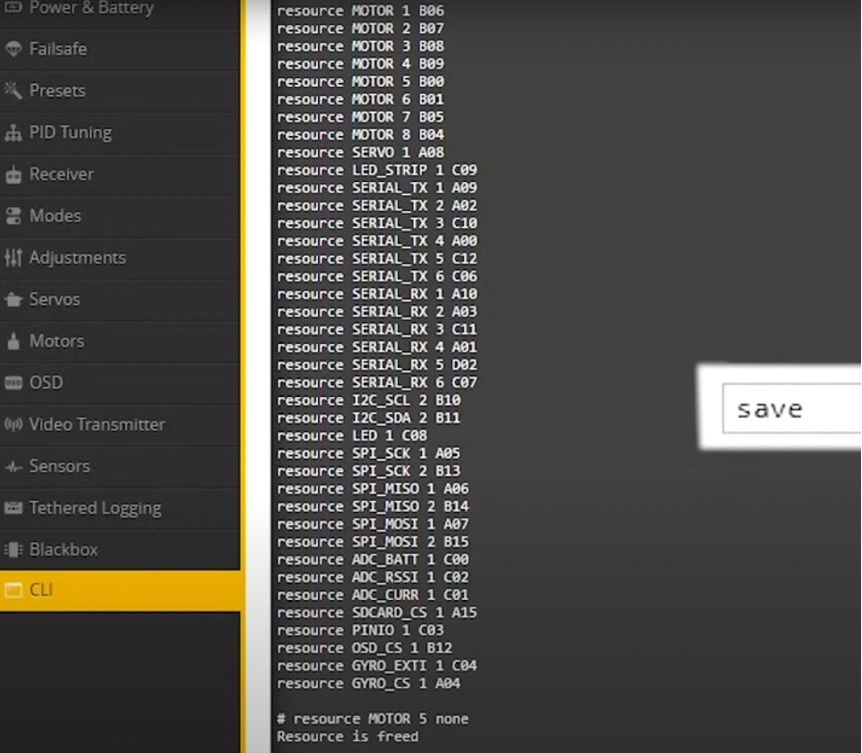
- Write the command resource
- A LIST OF CURRENT RESOURCES APPEARS
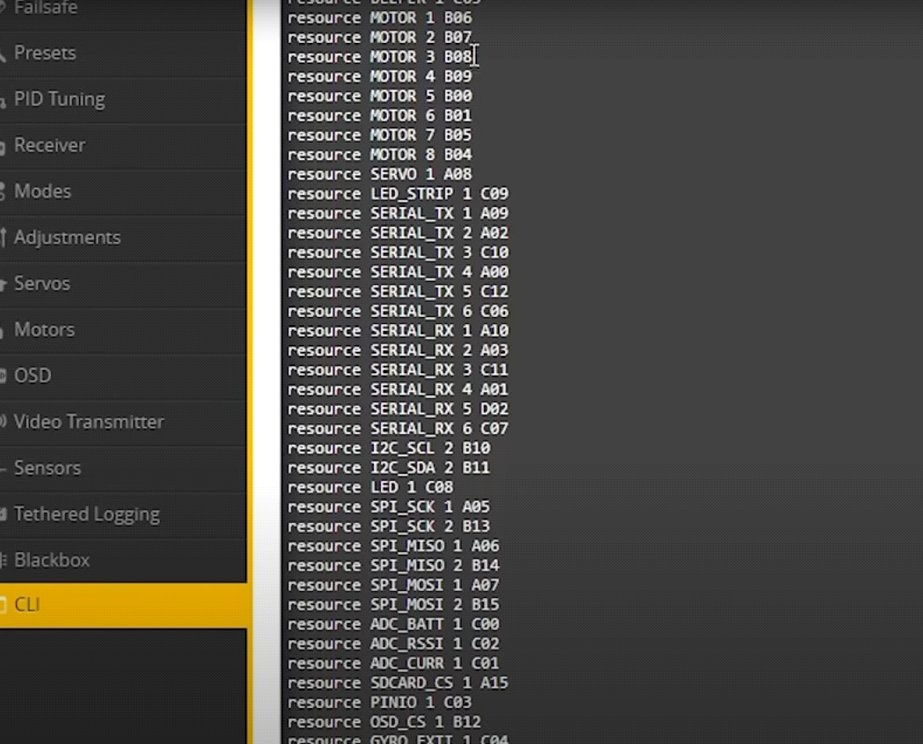
- Copy the life of the M5 motor
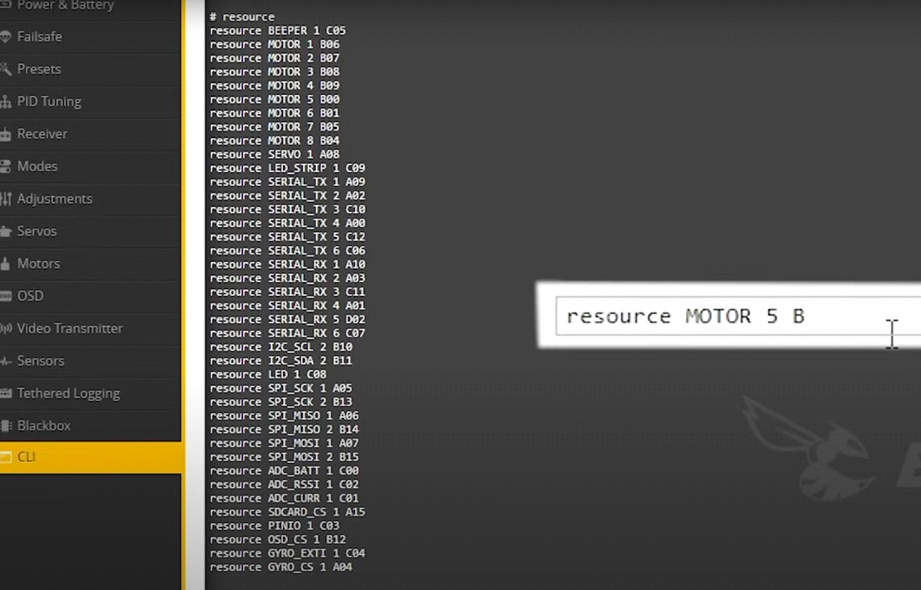
- Change the number of the contact pad B00 to the command none (untie)
- Press ENTER
- Insert the resource MOTOR 5 B00 line into the command line again and change the MOTOR resource to the SERVO 2 resource (the SERVO 1 resource is assigned to the S9 contact of the A08 platform)
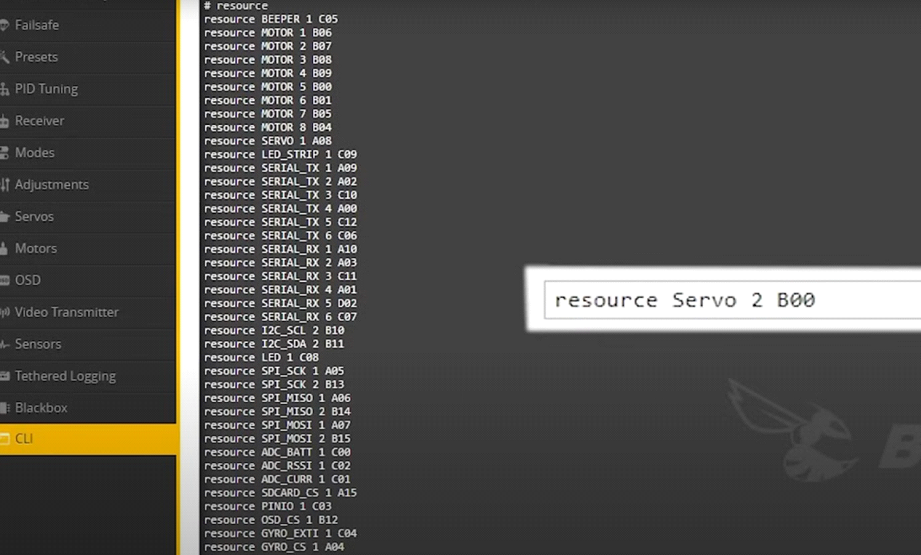
- Save the settings
The next steps for setting up will be described in the next article.


Write a comment